
MY EXPERIENCES
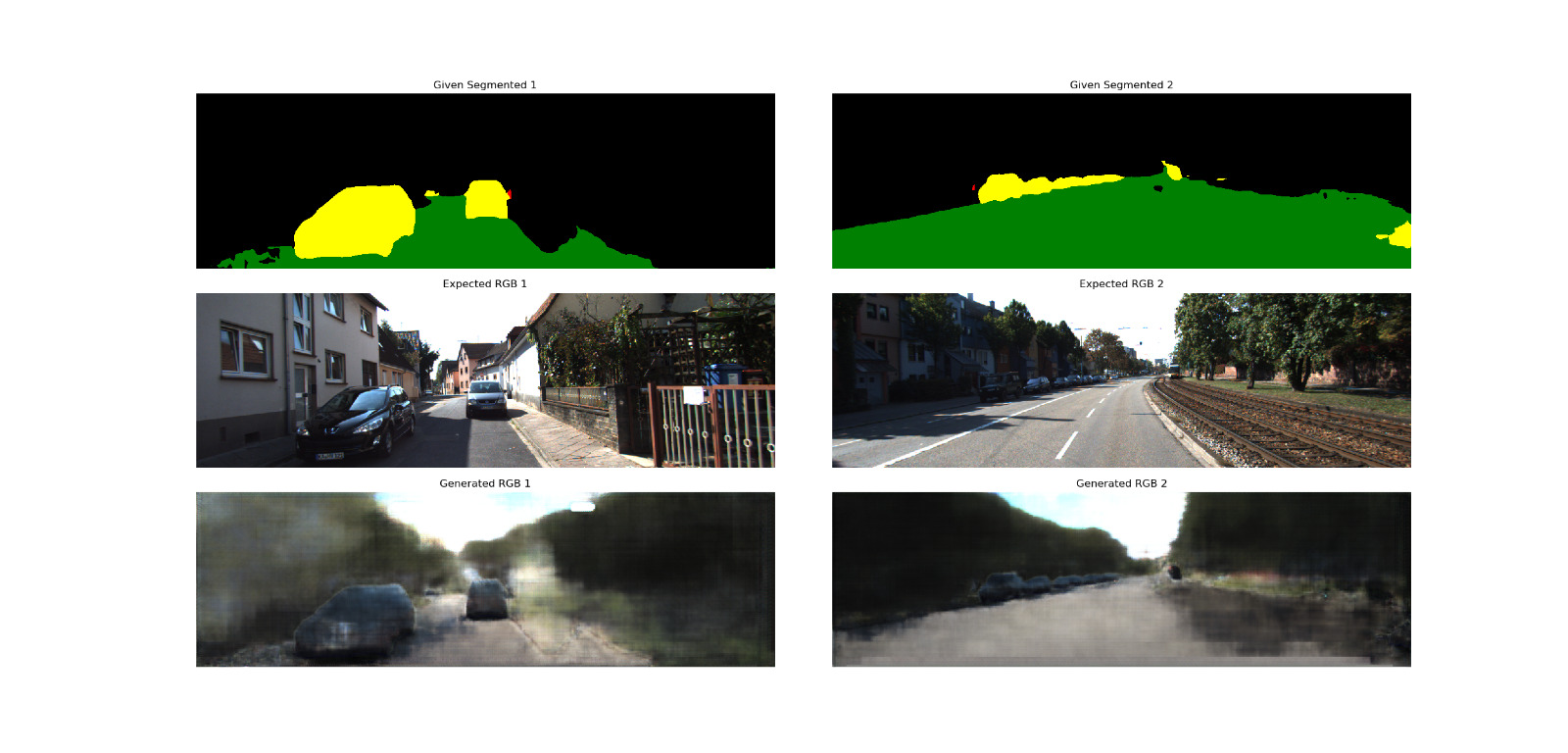
POINT CLOUD TO REAL WORLD IMAGE
We created a deep learning pipeline similar to pix2pix by using Pytorch which would take point cloud as the input and generates real-world like images. This project is still in development and only the first version of the code is currently available.
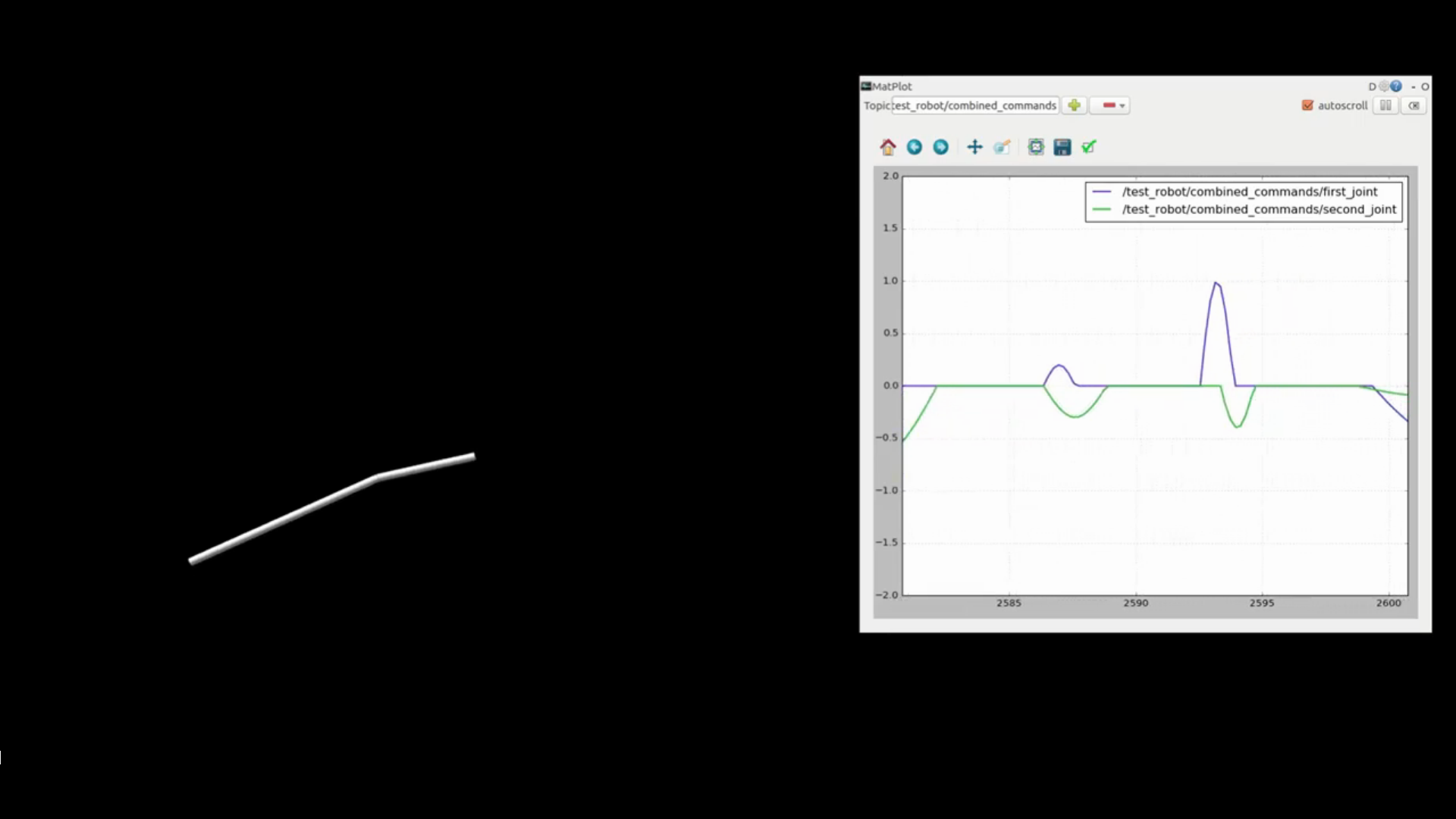
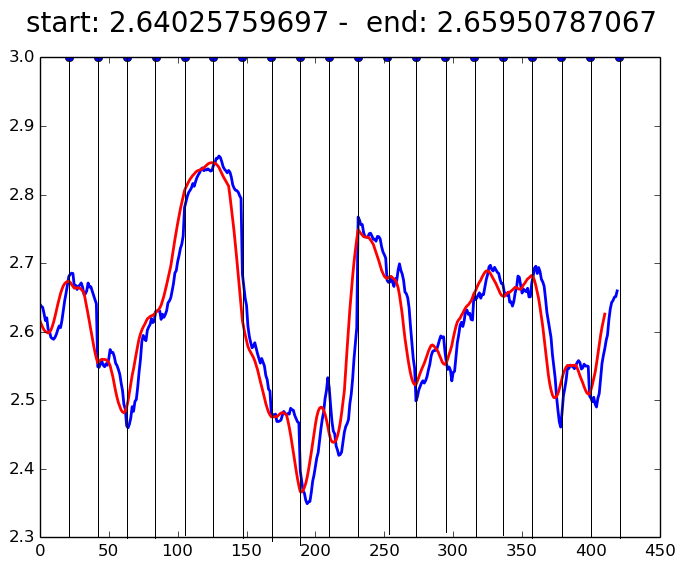
ROBOT TRAJECTORY GENERATION
For the first part of the project, I created two degrees of freedom robot and its driver in the Gazebo simulation environment. The purpose was to have a dataset for robot trajectory generation. After that, I created a CycleGAN pipeline from LSTM GANs by using Pytorch to generate trajectory from robots. This project is still in development.

TOOL DATASET CREATION AND ITS EVALUATION
We created a tool dataset and evaluated it on different object detection algorithms. The purpose of this project to create a tool dataset that robotic systems would use. We collected some real-world samples, but in addition to that, we are creating real like samples from different simulation environments like Unity3D. The current version of the dataset is tested on Faster R-CNN, YOLOv3, and RetinaNet. This project is still in development.

SAFETY-WATCHDOG
To create a compliant robotic companion I developed an ROS framework to make robots safer around human workers. This mechanism puts hard speed, acceleration and region limits for the robot. In addition to that, it changes the speed of the action in different regions to make it safer for a human worker. This project developed for CIRAK (Turkish for apprentice) international project.

MY PUBLICATIONS
CONTACT ME
Universiteler Mah, Orta Dogu Teknik Universitesi, Bilgisayar Muhendisligi, B:200, Cankaya, Ankara, Turkey
+90 506 906 40 39
fatih@ceng.metu.edu.tr
fatihcankurnaz@gmail.com